



Safe Positioning and Automated Driving
To further extend the ODD and by increase of the overall system safety, absolute vehicle positioning will be one of the crucial domain functions for ADAS & Autonomy stacks. Adding a highly integrative and safe GNSS can provide complementary characteristics to the ADAS stack to add massive technical value by safeguarding e.g. the activation and de-activation of AD functions, safe-stop maneuvers and lane keeping functions.
Today sensors such as radars, cameras, and LiDAR are used to map the environment. These technologies are extensively used, which creates a frame of reference so autonomous vehicles can perceive and detect the presence and status of objects and maneuver accordingly. We can use this to estimate the relative position and location of the surrounding objects. In this sense, local sensors can be used to locate objects that are relevant for vehicle maneuvers and for the localization of the vehicle. The localization function—for the vehicle or objects—is essential in the autonomous driving process.
The camera, radar, and LIDAR are sensitive to environmental conditions and might fail in specific situations as adverse weather conditions. To meet the most demanding requirements of autonomous driving, the system must be capable of progressively increasing the availability of the overall localization function and increasing the level of accuracy. This needs completely independent sensors with complementary characteristics. GNSS can fill this role, providing these complementary characteristics, and largely increasing the availability of the localization function.
GNSS is the only sensor technology that can be used for absolute vehicle positioning, which is essential for localization, down to centimeter-level accuracy and support of high-precision positioning with ensuring a high level of accuracy and integrity. Absolute positioning is also necessary to define a reference framework in V2X systems. Information exchanged between vehicles and / or infrastructure and other road elements to identify their location, the perceived environment, and their intended maneuvers require highly precise and safe positioning in addition to a standard reference framework that can be provided and built using GNSS. High precision GNSS also contributes to building and maintaining HD maps. These are a few examples of use cases where GNSS will play a pivotal role.
The higher the level of autonomy, the higher the needs in terms of functional safety and integrity for key functionalities such as the localization function. As such, GNSS-based positioning might also be required to satisfy certain functional safety and integrity requirements to guarantee minimal risk of HW failure and minimal probability of erroneous positioning information.
Hence, compatibility with automotive safety standards, ISO26262 and ISO/PAS 21448 (SOTIF) becomes of paramount importance.
Stemming from the belief that safe GNSS based positioning will play an absolutely essential role in autonomous driving and mobility applications of the near future, GMV and u-blox have partnered up to offer market ready end-to-end safe positioning solutions for ADAS and AD.
PointSafe
The combination of GMV’s high accuracy and safe positioning solution, with u-blox leading safe positioning hardware allows customers to save integration efforts and accelerate time-to-market while enjoying the advantages of a cost-effective, proven functional safe E2E positioning solution that delivers PVT and protection level at a set of target integrity risks. This combined approach provides the first flexible end-2-end solution directly to the automotive customer for ADAS level 2+ and above (levels 3 – 5) with an easy integration into several target electric and electronic architectures at mass market compliant cost.
u-blox and GMV offer a robust, reliable, and high-performance solution that provides high accuracy and safe GNSS corrections. This is generated with an on board GNSS receiver, chipset or module developed according to the ISO26262 standard that receives the satellite signal, processes them and outputs high quality raw measurement; GMV’s GNSS Correction Service and an ASIL-B ready positioning software—Positioning Engine—that calculates reliable and precise vehicle positioning and other parameters using advanced algorithms developed by GMV, in line with the most demanding automotive regulations and the highest quality standards to develop critical software. To this end, the positioning engine uses GNSS signals, integrated with data from other sensors onboard the vehicle, together with the aforementioned High Accuracy and Safe GNSS corrections.
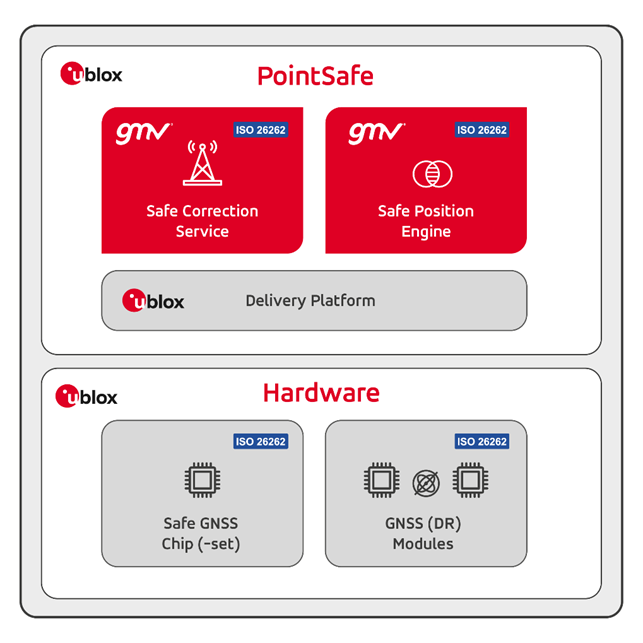
The GNSS receiver, Corrections Service and the onboard positioning software (Positioning Engine) have been developed following ISO 26262 and ISO 21448 standards to ensure compliance with the safety requirements that apply to autonomous driving. The solution also complies with the concept of security by design in accordance with ISO 21434, incorporating necessary countermeasures in the software and in the system to detect GNSS-related attacks (anti-spoofing and anti-jamming schemes) and other existing vulnerabilities. While developing the solution, the rigorous project management practices required in the automotive industry were applied, and the strictest quality standards applicable to automotive software engineering (A-SPICE CL3) were followed.
Outstanding performances
GMV and u-blox safe automotive solution is a ready-to-use solution with guaranteed performance resulting from years of work and thorough validation activities. Following a cutting-edge safety validation methodology and approach that entails simulation, signal edit&replay activities and millions of kilometers driven in different scenarios, performances achieved include sub-lane level accuracy (centimetric), combined with an Integrity Risk of up to 10-7 per hour, high availability of more than 99.9%, fast convergence, almost instantaneous reconvergence times, and the guarantee to achieve this performance in different scenarios thanks to the hybridization with other sensors in the vehicle such as Inertial Measurement Units, wheel speed sensors, and odometers. This makes the solution unique for the intended applications.
High levels of integrity are one of the keys to implementing safety-of-life automotive applications.
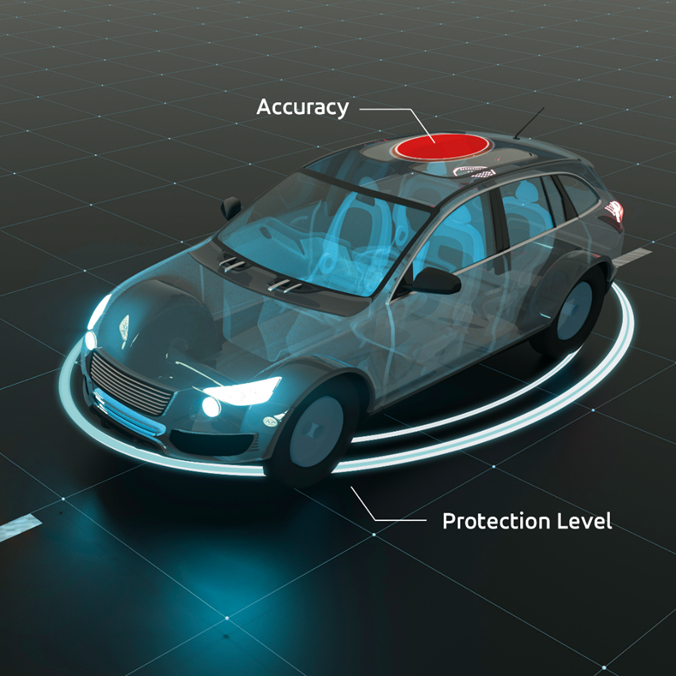
The combined solution provided by GMV and u-blox can be used for highly accurate positioning, but this is not enough. We need the positioning information to be safe and reliable. Our solution for automotive incorporates the ability to detect and exclude sources of error and hazards affecting the positioning data in real-time, calculating a confidence area, defined by what is known as the Protection Levels. The probability of erroneous positioning information is extremely low and below a very demanding target probability (the Target Integrity Risk or TIR) within the confidence area. In this regard, the solution is accurate and trustworthy and can be used in autonomous and automated driving functions.
Considering the market
High levels of integrity are one of the keys to implementing safety-of-life automotive applications. Sensors, regardless of their performance, are only useful when the system can trust their output. Providing protection levels and alert limits at a Targeted Integrity Risk (TIR) enables Advanced Driver Assistance Systems (ADAS) to have the confidence required in the position and velocity output delivered by the system.

Moreover, all this would make no sense if it could not be applicable to the targeted market segment Historically, getting precise positioning for the automotive industry has been too expensive to afford, targeting niche applications at a high cost. u-blox & GMV’s trustworthy and precise GNSS positioning solution enables autonomous vehicle manufacturers to significantly enhance accuracy and safety at a fraction of the cost of other ADAS sensors, as an affordable and very cost-efficient cutting-edge technology.















{kind=link}