



The ocean underpins a wide range of industrial activities including fishing, maritime transport, marine resource development and port infrastructure development. Securing human resources to perform underwater tasks in these fields is a challenge. In particular, diving operations in deep water areas and areas with fast currents require expert human resources with advanced diving skills. However, maintaining and developing such human resources is difficult. Therefore, people are seeking ways to improve work efficiency and safety.
In the future, it will be essential to improve productivity by utilizing IT technology to develop fishing, maritime transport and maritime infrastructure. Underwater drones are expected to help address labor shortages and carry out tasks in dangerous areas in place of humans. Here, we describe underwater communication methods as well as positioning and distance measurement technologies, with a focus on the fundamental knowledge of AUVs, which have recently been attracting attention as a class of underwater drone.
1. What is an Underwater Drone?
“Underwater drone” is the common name for small, unmanned vehicles capable of underwater navigation. Underwater drones can be operated remotely from on board a ship or on land. Alternatively, they can operate autonomously. Equipping these drones with a small camera makes it possible to confirm the images they capture in real time. In addition, mounting a robotic arm or other manipulator allows them to perform a wide variety of tasks. Therefore, it is hoped that they will be able to perform underwater tasks in place of humans.

2. Types of Underwater Drones: AUVs and ROVs
There are two types of underwater drones: autonomous underwater vehicles (AUVs) and remotely operated vehicles (ROVs).
An AUV operates and moves according to its pre-programmed instructions. Communication between the AUV and the surface is performed wirelessly. No cables are used for the power source or communication; instead, power is supplied by batteries and communication is performed wirelessly. There are no restrictions on the operation range due to cable length and there is no risk of the cable becoming tangled. This makes it possible for multiple AUVs to be utilized for tasks covering large areas and at great depths.
On the other hand, an ROV is connected to a control system by a cable and a person operates the drone from the surface. Power can be supplied via the cable, so ROVs can be operated for long periods. High-speed communication through the cable is also possible. As a result, ROVs are becoming widely used, ranging from industrial applications to recreational use. However, there are restrictions on the range of movement due to the cable length and it is necessary to have a ship to carry the power supply and other equipment. Furthermore, if operating multiple units at the same time, it is also necessary to watch out for issues such as tangled cables.
For those reasons, great expectations are being placed on AUVs as underwater drones that can overcome the disadvantages of ROVs.
3. AUV Wireless Communication Methods
Communication with equipment on shore and ships is essential to receive the data from the cameras and various sensors equipped in AUVs. In addition, the sending and receiving of data needs to be performed wirelessly in the case of AUVs with no cables. However, wireless radio transmission is difficult underwater. Therefore, wired methods have been the norm until now. This was a major challenge to putting AUVs to practical use. In recent years, progress has been made on the development of acoustic communication and optical communication that enable wireless communication underwater. Furthermore, there are high expectations for communication technology that employs LF antennas to enable accurate positioning and distance measurement over short ranges near a destination.
Underwater Acoustic Communication
This method uses sound waves for communication. Wireless communication can be performed underwater and long-distance communication is possible. However, the frequency band is narrow, so the communication capacity is low. Accordingly, this method is not suitable for the high-speed communication of large amounts of data such as images and video.
Underwater Optical Communication
High-speed communication in the 1 Gbps class is possible with this method. Moreover, video streaming and high-resolution image/video transfer are thought to be possible. On the other hand, if the light is blocked due to underwater debris or pollution, communication may become unstable.
LF Communication Using LF Antennas
This is a method of communication that uses magnetic fields for transmission and reception. The communication distance is short, at just a few meters. However, it is less susceptible to being affected by attenuation from water or obstacles such as pollution because it uses magnetic fields. Accordingly, it is expected that this method will be utilized in settings where positioning and distance measurement with a high degree of accuracy are required.
4. Utilization of Positioning and Distance Measurement Technologies That Use LF Antennas (Antenna Coils) in AUVs
Communication methods using sound waves, light, and magnetic fields each have their own advantages and disadvantages. Currently, attempts are being made to use these methods in combination to capitalize on their respective advantages. Furthermore, underwater tasks are becoming increasingly complex, which means even more accurate positioning and distance measurement technologies are being sought. In the following section, we look at the fundamental knowledge of LF antennas and examples of their utilization in AUVs.
Features of LF Antennas
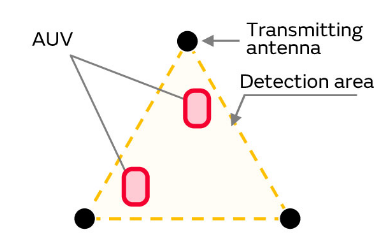
LF antennas communicate using magnetic fields. These antennas are already widely used in automobile smart keys and other applications. They are comprised of a transmitting antenna and a receiving antenna. The receiving antenna receives the magnetic fields emitted by the transmitting antenna to measure the position of the receiving antenna based on the signal strength (magnetic field strength).
The communication distance is short, at a few meters. However, positioning and distance measurement over a wide area is possible by installing transmitting antennas at fixed intervals around the location. In addition, this method is highly accurate, with measurement errors of just a few centimeters. Magnetic fields are less susceptible to reflection and diffraction, and they are not attenuated by obstacles, including underwater pollution. Therefore, it is hoped that it will be possible to utilize this method to guide AUVs near the locations of tasks and other areas.
Main Examples of the Utilization of LF Antennas
The following are examples of how LF antennas with the features described above can be utilized in AUVs.
- Accurate positioning for the task position:
Pollution rising from the seabed, riverbed, or elsewhere can obstruct optical communications in underwater operations. Even in such conditions, LF antennas using magnetic fields enable stable positioning and distance measurement. - Guidance to power supply systems:
It is possible to accurately guide AUVs to the power supply position with LF antennas that are capable of highly accurate positioning and distance measurement, even for power supply systems requiring guidance to within a few centimeters. - Detection of approach to dangerous areas:
An alarm can be triggered if the AUV approaches a place which it should not enter. Safe AUV operation is possible even in such cases because magnetic fields are not affected by water pollution or obstacles.
5. Summary: What Underwater Communication Technology Brings to AUVs
AUVs are devices that perform underwater tasks previously done by humans. They can significantly contribute to solving the various issues that accompany underwater tasks. In particular, AUVs are expected to play a role in the ocean, a base for industrial activities, through the following types of underwater tasks.
- Inspections of offshore wind power generation equipment:
Installation and inspection of underwater foundation structures, undersea cables to send generated electricity to the shore, and other equipment, as well as checking the condition of the seabed and anti-scouring materials. - Surveys of undersea conditions:
Prediction of natural disasters through measurement of the water temperature and surveys of seabed topography, soil quality, water current, and other conditions. - Surveys of the marine environment:
Surveys of the condition of underwater sludge and faults, and surveys of underwater resources such as hydrothermal deposits, methane hydrate, and manganese nodules.
To realize these applications, safe operation and accurate guidance technologies for AUVs are necessary. Improvements in underwater communication technologies are essential for that. Building an optimal underwater wireless system by combining acoustic, optical, LF-antenna-based magnetic, and other communication methods is expected to greatly contribute to the practical application and industrialization of AUVs in the future.
Source: Murata article















{kind=link}