



The case study on West Nile Virus & Mosquito Nuisance Prevention with a UAV, highlighting the usage of Drone Technology in Precision Pest Management & Control
SPH Engineering a drone software company and UAV integration service provider together with their partner GDG Environment, the ecological solutions provider provides a Case Study from a drone-based larviciding research program under the PMRA, Canada’s pesticide regulatory agency.
The goal of the study was to find a solution to quickly manage biological larvicide treatments in large and difficult-to-traverse locations. To work on reducing mosquito nuisance GDG Environment brings different drone and payload models into their fleet and was challenged to monitor a several thousand-hectare region and treat all mosquito breeding sites within it in just five days.
To address the issue of protecting local communities from a natural threat, GDG Environment opted for SPH Engineering’s UgCS .NET SDK software for the West Nile Virus & Mosquito Nuisance Prevention.
Detailed Description of the case study is mentioned below by Benjamin Russell, Project Supervisor and Developer at GDG Environment, specializing in developing software solutions that enhance drone-based services.
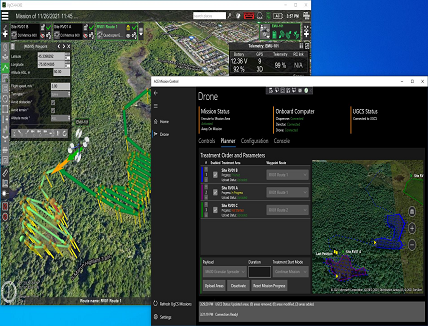
“Drone technology can be implemented into pest management and agriculture in a number of ways, but in general drones are used to either gather useful information or distribute something over the ground. In our case we are using the drones to carry a spreading device that distributes a granular mosquito larvicide. Prior to this, ground teams perform inspections in areas we suspect to be producing mosquito larvae. If we identify mosquito larvae of a species we are trying to control, we will use mapping tools to create a polygon defining the region that needs to be treated with larvicide.
This polygon is sent to UgCS, which generates a route for the drone to fly. With our custom software built using the UgCS .Net SDK, we send the same route to a computer onboard the drone that controls the spreading device. Through UgCS we activate an autopilot mode, which automatically flies the generated route over the area that needs to be treated. Using the output of the drone’s GPS array and positioning sensors, the onboard computer activates (boom on) and deactivates (boom off) the spreading device as the drone makes passes over the designated area.
The drone can only carry a limited payload at a time due to battery and weight constraints, so it takes several flights to cover a typical treatment region. Our custom software handles pausing and resuming the treatment in the right spot to ensure full coverage. We have implemented safety mechanisms such that if the pilot needs to take control of the drone, or any unexpected behaviour occurs, the spreading device shuts down until the drone is brought back to the landing site.
Pesticide applications performed with UAV’s are generally not approved yet in Canada, and we are performing these applications under a research authorization from Health Canada’s pesticide regulatory agency, the PMRA. We have not released any official reports on the results of this research yet except for our reporting to the PMRA.”















{kind=link}