



One of the most important features of an unmanned aerial system is its ability to provide visual insights through EO/IR (Electro-Optical/Infra-Red) sensors. These systems are critical tools in military and homeland security applications due to their wide spectral range of operation, which allows them to operate both day and night, even in low-light conditions. An example of this is the use of UAVs in ISTAR missions, where advanced camera gimbals play a key role.
Recording from an unmanned vehicle is a complex process because images need to be captured during the dynamic conditions of flight. The platform moves, vibrates, and experiences varying light conditions, which necessitates advanced focus stabilization to capture high-quality images.
One of the core challenges that both gimbal and platform manufacturers face is the need for rapid stabilization of the camera. Depending on the nature and purpose of the mission, these payloads may require different integration strategies.
For that reason, UAV Navigation-Grupo Oesía offers five levels of integration strategies.
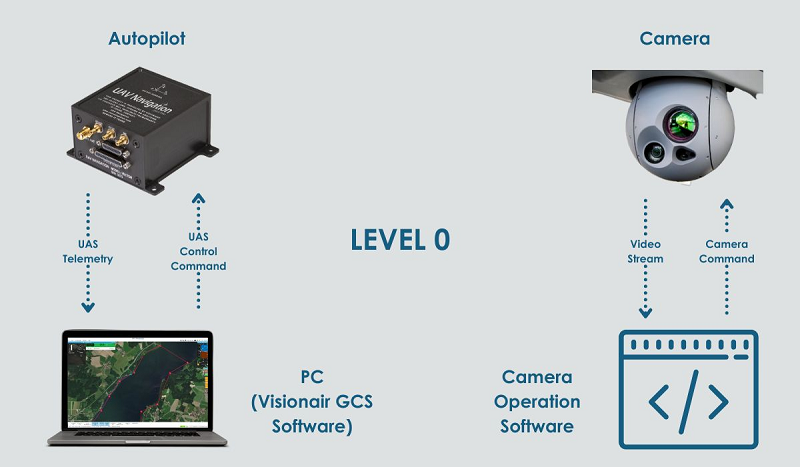
Level – 0: No Software Integration
The first level involves integrating the gimbal with the flight control system without requiring software integration. This approach offers the client greater flexibility, as it eliminates potential telemetry limitations and communication link issues related to datalink bandwidth.
Level – 1: AHRS Communication for Stabilization
The autopilot provides the EO/IR system with the necessary data to stabilize the image. As mentioned earlier, some cameras include IMUs to estimate the platform’s attitude. However, many gimbal manufacturers offer solutions without IMUs to reduce costs. UAV Navigation-Grupo Oesía’s autopilots and AHRS systems feature sensors with advanced algorithms that enable precise stabilization, leading to improved performance. Additionally, using data from the autopilot helps lower costs by eliminating the need for cameras equipped with INS (Inertial Navigation Systems).

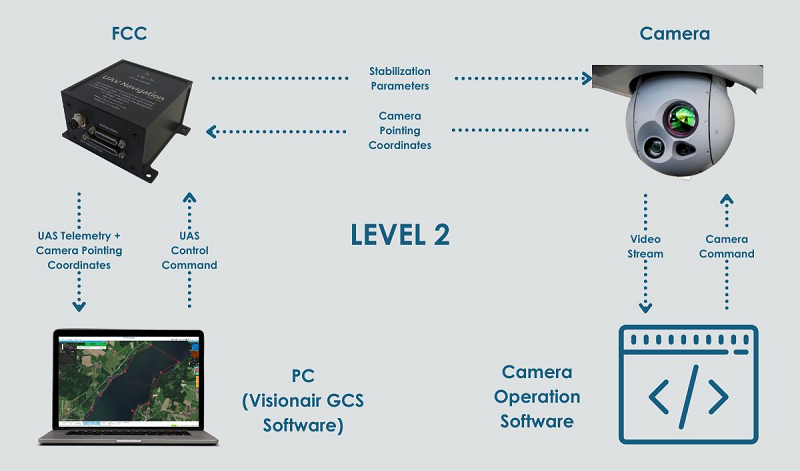
Level – 2: Camera Feedback
With this level of integration, the user can visualize the camera’s target coordinates, enhancing the operator’s situational awareness. Additionally, these coordinates can serve as a reference for navigation. This integration allows the platform to automatically follow the coordinates provided by the camera, enabling a ‘camera-guided‘ mode. This capability is particularly useful for tracking moving targets, which is made possible by our autopilot reference navigation capabilities.
This level of integration is achievable if the camera has a geo-pointing feature. It’s important to note that the coordinates provided by the camera can be obtained either automatically (through object tracking) or via manual input, so attention should be given to the camera’s features.
Level – 3: Complete Integration for an all-in-one Operation
Level 3 offers full integration between the EO/IR sensor and the FCC. The GCS allows the user to control the camera’s pointing coordinates directly by clicking on the Visionair map without the need for any additional applications. This seamless integration makes it easy to use advanced features like camera-guided flight mode or a camera geo-pointing feature that is coordinated with the FCC’s flight mode.
This level of integration, in which the autopilot receives feedback info from the camera, allows other advanced features as it is the head’s up display in the Primary Flight Display (PFD), to visualize the aircraft flight as in an FPV (First Person View) mission.

VECTOR-MCC: The Customer DIY & Flexible Alternative
This involves the use of the VECTOR-MCC, a Mission Control Computer designed to enhance operational flexibility. It allows users to develop custom drivers for payloads that are not critical to flight safety, thus avoiding any risk of interfering with core UAS control functions. One such example is camera gimbals.
With the VECTOR-MCC, clients can develop their own drivers to enable communication between the autopilot and the camera, achieving various levels of integration. Additionally, customers will be able to implement camera control logic to manage the camera, including adjustments to aim, zoom, and focus.
Achieving this level of integration requires significant computational and software expertise, so manufacturers should have specialists in payload integration and device communication.
This approach is particularly suitable for projects seeking certification, as it separates critical tasks related to guidance, navigation, and control of the aircraft from non-critical tasks, such as those related to camera gimbals or mission payloads. It also offers flexibility for clients looking to adapt peripheral systems.

At UAV Navigation-Grupo Oesía, we fully understand the needs of the UAS sector and the technological advancements made by platform and gimbal manufacturers. We maintain strong relationships with leading camera manufacturers and have collaborated with them to explore viable solutions.
For these reasons, we are committed to offering our clients flexibility when integrating critical payloads, such as camera gimbals, into their UAS. This is why we provide several options for integration and operation.
Contact us, and our customer service experts will help you find the most suitable solution for your project.
Source: UAV Navigation Blog
















{kind=link}